

I Filtri digitali - prima parte
L’arguto Cantadori ha avuto modo, nei suoi scritti sulla presente rivista, di accennare più volte l’argomento “filtri”. Proviamo qui ad approfondire un poco alcuni dettagli teorici e implementativi.
di Michele Viola
L’arguto Cantadori ha avuto modo, nei suoi scritti sulla presente rivista, di accennare più volte l’argomento “filtri” (anche nel senso, del tutto appropriato, di “setacci”). Nei numeri 88 e 89, in particolare, c’era qualcosa più di un cenno sui filtri digitali. Proviamo qui ad approfondire un poco alcuni dettagli teorici e implementativi.
I filtri digitali, a differenza di quelli analogici, agiscono direttamente su un segnale numerico e sono fatti di calcoli: somme, moltiplicazioni, ritardi.
Il funzionamento dei filtri digitali è basato sul concetto di comb filtering: sommando un segnale con una sua copia ritardata (figura 1), si ottiene un filtraggio, ovvero alcune frequenze risulteranno esaltate mentre altre frequenze risulteranno attenuate.
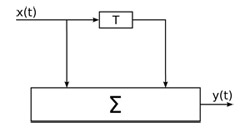
Figura 1: schema a blocchi di un comb filter.
In particolare, le frequenze per cui il ritardo corrisponde a un multiplo intero della lunghezza d’onda saranno raddoppiate in ampiezza, mentre le frequenze per cui il ritardo corrisponde a un multiplo dispari di mezza lunghezza d’onda risulteranno virtualmente annullate o comunque fortemente attenuate. La risposta in frequenza di un filtro siffatto, composto di un ritardo e di una somma, è riportata in figura 2.

Figura 2: risposta in frequenza di un comb filter.
È possibile, naturalmente, sommare più di due copie del segnale, ciascuna con un proprio ritardo. Le diverse copie del segnale possono anche essere singolarmente amplificate o attenuate prima della sommatoria. I componenti (digitali o analogici) che realizzano questa funzione si chiamano filtri trasversali o anche, forse più comunemente nel caso dei filtri digitali, filtri FIR. Lo schema a blocchi di un filtro trasversale è riportato in figura 3.
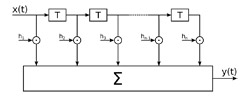
Figura 3: schema a blocchi di un filtro FIR.
Ci sono, sostanzialmente, due tipi di filtri digitali: i filtri FIR (Finite Impulse Response, tradotto: Risposta all’Impulso Finita), detti anche filtri trasversali, ed i filtri IIR (Infinite Impulse Response, cioè Risposta all’Impulso Infinita), detti anche filtri ricorsivi.
I segnali digitali si possono pensare composti di una successione equispaziata di impulsi. Sommare copie del segnale ritardate significa semplicemente sommare diversi campioni successivi nel tempo. I campioni possono essere ciascuno moltiplicato per un determinato coefficiente, prima della somma. Lo sfasamento temporale tra due campioni successivi nel tempo è pari al periodo di campionamento.
A differenza dei filtri FIR, i filtri ricorsivi (IIR) utilizzano per il calcolo del segnale d’uscita anche un certo numero di valori precedenti del segnale d’uscita stesso. In altri termini il segnale d’uscita, oltre a proseguire verso i blocchi di elaborazione successivi, è riportato, in diverse copie ritardate tra loro, in ingresso al filtro. Lo schema a blocchi di un filtro ricorsivo è riportato in figura 4.

Figura 4: schema a blocchi di un filtro IIR.
Da notare che il filtro trasversale di figura 3 si può pensare come un caso particolare del filtro di figura 4, corrispondente al caso in cui tutti i coefficienti moltiplicatori ki sono nulli. Se, invece, sono i coefficienti hi nel filtro ricorsivo di figura 4 ad essere tutti nulli (tranne il primo), cioè se l’uscita del filtro dipende solamente dai valori precedenti dell’uscita e dall’ingresso attuale ma non dai valori precedenti del segnale di ingresso, allora il filtro si chiama puramente ricorsivo ed il relativo schema a blocchi è riportato in figura 5.
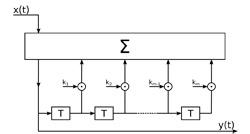
Figura 5: schema a blocchi di un filtro IIR puramente ricorsivo.
La media mobile
Un filtro FIR particolarmente semplice, nonché significativo, è quello in cui i coefficienti moltiplicativi sono tutti uguali: questo corrisponde, in pratica, a calcolare la media aritmetica degli ultimi n campioni. Questo tipo di calcolo si chiama media mobile. Mobile perché, pur coinvolgendo un numero fisso di termini, l’intervallo temporale su cui è eseguita la media avanza con il segnale. Per calcolare un campione di una media mobile a cinque punti, ad esempio, occorrono gli ultimi cinque campioni del segnale da elaborare:

Per il campione successivo, serviranno ancora gli ultimi cinque campioni (quindi via il primo e dentro l’ultimo):

Dal punto di vista dell’elaborazione del segnale, la media ovviamente smorza le variazioni, ovvero si comporta come un filtro passa-basso.
Per molti aspetti, in verità, non è un gran filtro passa-basso. L’attenuazione in banda oscura non è un granché e, contemporaneamente, la pendenza è piuttosto blanda.
La risposta in frequenza (in dB) della media mobile, per diverse lunghezze della media, è riportata in figura 6. Da notare gli zeri della risposta in frequenza alle frequenze multiple intere dell’inverso del periodo della media: per la media ad m punti il primo zero è alla frequenza f0/m.
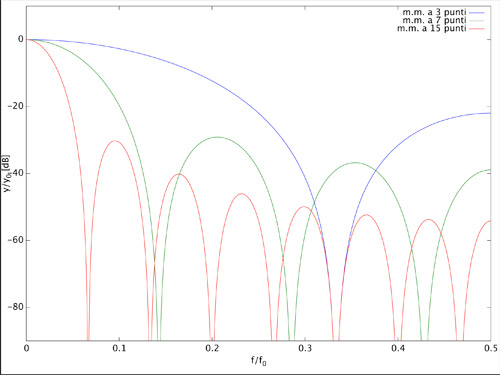
Figura 6: risposta in frequenza della media mobile, in dB, al variare della lunghezza del filtro.
Nonostante le caratteristiche non esaltanti nel dominio della frequenza, il filtro a media mobile presenta alcuni vantaggi rispetto ad altri tipi di filtro. Prima di tutto è semplice da calcolare e quindi da implementare anche quando le risorse di calcolo a disposizione sono particolarmente limitate. Si potrebbe dimostrare facilmente, inoltre, che la media mobile è la soluzione ottimale per attenuare il rumore casuale su un segnale preservando più possibile la pendenza dei fronti di salita e di discesa degli impulsi.
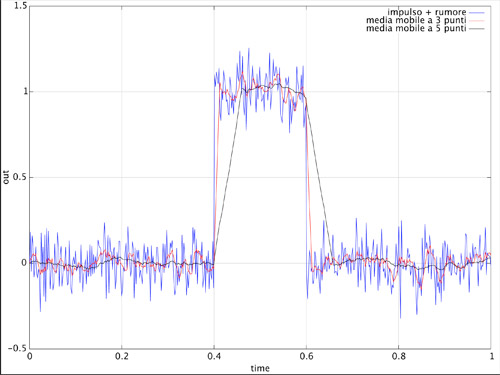
Figura 7: un impulso con rumore sovrapposto e il segnale filtrato con la media mobile.
Dal punto di vista della semplicità di calcolo del filtro a media mobile, un’interessante considerazione riguarda l’implementazione ricorsiva, tenendo presente che la media aritmetica di n valori è proporzionale alla loro somma. In corrispondenza di ciascun istante di campionamento, infatti, per ottenere il nuovo valore è sufficiente togliere alla somma precedente il valore più vecchio e aggiungere quello nuovo: una moltiplicazione, una sottrazione e una somma, oltre alla divisione per n, indipendentemente dalla lunghezza del filtro. Considerando, ad esempio, la media a cinque punti calcolata in precedenza, si può scrivere:
![]()
e quindi, per il campione successivo:
![]()
Avendo calcolato il campione precedente, però, si può utilizzare questo valore per calcolare il valore successivo:

da cui:

Generalizzando, per qualunque valore di n:

Occorre notare che quest’ultima implementazione della media mobile, pur essendo di fatto ricorsiva, non presenta le caratteristiche tipiche dei filtri ricorsivi in genere; mantiene, in particolare, la risposta all’impulso finita.
A questo punto lo spazio a disposizione è finito; non posso che ringraziare chi è arrivato a leggere fin qui, per l’attenzione che ha voluto dedicare a questo scritto. Nei prossimi numeri proseguirò la trattazione dell’argomento cercando di approfondire un poco i concetti alla base dei filtri FIR e IIR.


